이번에는 진동 측정에 대해서 알아볼 텐데 진동 측정에 필요한 지식이나 진동을 측정하는 방법에 대해서 설명해 보겠습니다. 진동 측정을 하려면 기본적으로 FFT에 대한 지식이 필요합니다. 그런데 복잡한 수식 계산은 어차피 컴퓨터나 진동 측정 장치에서 처리하기 때문에 그리 중요하지 않으므로 FFT의 특성에 대해서만 간략하게 알아보겠습니다.
1. 샘플링 속도 (Sampling Rate)
샘플링 속도는 데이터를 측정하는 속도로 1초 동안의 데이터 수집량을 말합니다. 측정한 데이터는 FFT 함수에 의해 주파수로 변환되는데, 이때 나이퀴스트 이론에 의해 측정 가능한 최대 주파수는 샘플링 속도의 반이 됩니다. 예를 들어서 30Hz인 신호를 측정하려면 적어도 1초에 60개 이상의 샘플을 수집해야 합니다. 측정의 정확도를 높이기 위해서 목표로 하는 주파수의 5배 내지 10배의 샘플링 속도를 사용하기도 합니다.
2. 주파수 해상도 (Frequency Resolution)
주파수 해상도는 FFT 함수로 변환된 데이터 사이의 간격을 말하는데, df = 1/T이라는 공식을 따릅니다. 여기서 T는 측정 시간으로 1초 동안 측정한 데이터는 1Hz, 2초는 0.5Hz, 4초는 0.25Hz, 10초는 0.1Hz의 주파수 해상도를 가집니다.
3. 윈도우 (Window)
측정한 데이터의 파형이 주기적인 형태가 아닌 경우, FFT 변환 시에 누설(Leakage)에 의한 오차가 발생하는데 이러한 현상을 방지하기 위해서 윈도우를 사용합니다. 윈도우는 비주기적인 신호를 주기적인 신호로 바꿔주는 역할을 하며, 여러 가지 윈도우(Hanning, Hamming, Blackman 등) 중에서 일반적인 진동 측정은 주로 해닝(Hanning) 윈도우를 사용합니다.

4. 오버랩 (Overlap)
위의 그래프를 보면 아시겠지만 측정 데이터에 윈도우를 적용하면 윈도우 효과로 인해 가운데를 기준으로 좌우의 데이터가 점층적으로 누락되는 부분이 생깁니다. 오버랩은 이러한 현상을 보완하기 위한 대책으로 측정 데이터를 중첩시키는 방법인데, 데이터의 손실을 방지하려면 최소한 66.7% 이상의 데이터를 오버랩해야 합니다.
5. 평균 (Averaging)
평균은 측정 데이터의 노이즈를 감소시키고, 정확도를 높이기 위해서 사용합니다. RMS나 Peak Hold 등의 계산 방법이 있으며, 가중치의 적용 방식으로는 선형과 지수가 있습니다. 선형은 일반적인 방법으로 평균을 구하며, 지수는 뒤에 측정한 데이터의 가중치가 점점 증가하는 방식으로 평균을 구합니다.
6. 단위 (Unit)
FFT의 단위는 기본적으로 측정 센서의 단위를 따르며, 진폭의 크기를 나타내는 단위도 함께 표시합니다. 진폭의 단위로는 rms, 0-to-peak, peak-to-peak가 있습니다. rms는 root mean square의 줄임말로 제곱평균제곱근인데, 일반적인 방법으로 사인함수의 평균값을 구하면 0이 나오기 때문에, 음의 값도 제대로 평균값에 반영이 될 수 있도록 모든 값의 제곱에 대한 평균의 제곱근을 구하여 rms라고 표시합니다. rms는 진폭을 √2 로 나눈 값입니다. 0-to-peak는 0에서 최대치까지 그리고 peak-to-peak는 최소치에서 최대치까지이며, rms 값에 √2를 곱하면 0-to-peak가 되고, rms 값에 2√2 를 곱하면 peak-to-peak가 됩니다. 진폭 단위의 표시는 rms는 RMS로, 0-to-peak는 P나 PK, 0-PK로 표시하며, peak-to-peak는 PP 또는 P-P, PK-PK와 같이 표시합니다. 가속도를 측정할 때는 단위로 g(중력가속도)나 m/s²을 사용하는데, 미세한 진동을 다루는 경우에는 gal(1gal = 1cm/s² = 0.01m/s²)을 사용하기도 합니다. 일본의 제진대 회사들은 주로 gal을 사용하는 편입니다.
7. 미분, 적분 (Differentiation, Integration)
진동을 측정할 때는 주로 가속도 센서를 사용하는데 측정 결과를 속도나 변위로 나타내야 하는 경우도 있습니다. 이러한 경우에 가장 좋은 방법은 속도는 속도 센서, 변위는 변위 센서로 측정하는 것이지만 미분이나 적분을 해서 센서의 신호를 원하는 단위로 변환할 수도 있습니다. 그리고 FFT로 주파수 변환된 값도 미분 또는 적분으로 단위를 변환할 수 있습니다. 다만 시간축 신호를 적분하면 오프셋이나 노이즈로 인해 신호가 왜곡될 가능성이 있으므로 가급적이면 주파수 미적분을 사용하는 것을 추천합니다. 주파수 미적분은 각각의 주파수 값을 2πf로 나누면 적분이 되고, 2πf를 곱하면 미분이 됩니다. 예를 들어 가속도가 4Hz에서 10m/s² rms인 경우에, 2πf인 2 x 3.14 x 4로 나누면 속도는 약 0.398m/s rms이고, 이를 한 번 더 2πf로 나누면 변위가 약 0.016m rms인 것을 알 수 있습니다.
FFT에 이어서 이번에는 FRF(Frequency Response Function)에 대해서 알아보겠습니다. FRF는 주파수 응답 함수로 어떤 시스템에 가해진 힘에 대한 응답을 분석하여 주파수 단위로 보여주는 역할을 합니다. 제진대의 성능을 평가할 때, 주로 이 FRF 그래프를 사용하는데 전달률(Transmissibility) 그래프라고 부르기도 합니다. FRF를 측정하려면 똑같은 센서를 한쌍으로 갖춰야 하며, 만약에 X, Y, Z 3축을 동시에 측정해야 한다면 1축 센서는 6개, 3축 센서는 2개가 필요합니다.
FRF 분석을 하면 그 결과로 Magnitude, Coherence, Phase의 세 가지 그래프가 나옵니다. Magnitude는 가해진 힘에 대한 응답 그래프이고, Coherence는 입력과 출력 사이의 인과성을 나타내는 그래프이며, Phase 그래프는 입력과 출력의 위상 차이를 보여줍니다. 진동을 측정하기 전에 센서 두 개를 한자리에 설치하여 FRF를 측정하면, 센서의 이상 여부 등을 확인할 수 있습니다. 아래 그래프는 PCB의 393B05 가속도계와 MCCDAQ의 MCC172를 사용하여 측정한 그래프로 약 3Hz부터 두 센서의 신호가 거의 일치하는 것을 확인할 수 있는데, 393B05는 0.7Hz부터 측정할 수 있는 센서이기 때문에 3Hz는 MCC172의 저주파수 측정한계라는 것을 알 수 있습니다.
지금까지 FFT와 FRF에 대해서 간단하게 알아봤습니다. 이제 마지막으로 진동을 바르게 측정하기 위해서 알아야 할 내용만 몇 가지 언급하고 마무리하겠습니다.
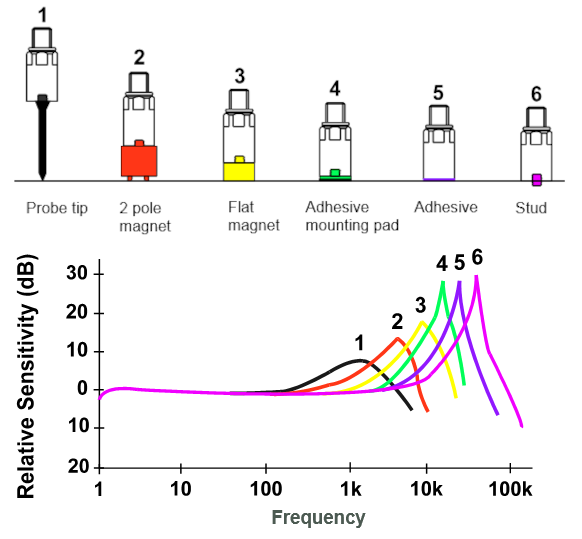
진동을 올바르게 측정하기 위해서는 센서를 원하는 위치에 적절한 방법으로 설치할 필요가 있습니다. 센서를 설치할 곳의 바닥은 센서와 바닥이 빈틈없이 밀착될 수 있도록 깨끗하고, 평평해야 합니다. 아래의 그래프는 가속도 센서의 설치 방법에 따른 주파수 응답의 차이를 나타낸 것인데 센서를 바닥에 단단하게 고정할수록(오른쪽으로 갈수록) 더 높은 주파수까지 측정 가능한 것을 확인할 수 있습니다.
그리고 진동을 측정하는 도중에 센서나 센서의 케이블을 절대로 건드리지 않아야 합니다. 만약에 센서나 센서의 케이블을 건드리면 잡음이나 인위적인 신호가 측정 결과에 섞이게 되어서 측정의 신뢰도가 떨어질 수 있습니다. 그래서 진동 측정 방법을 설명하는 자료 중에는 센서뿐만 아니라 센서의 케이블도 테이프로 고정할 것을 권장하는 경우도 있습니다. 그리고 FRF를 측정하는 경우에는 두 개의 센서를 가급적이면 같은 위치 선상에 두는 것이 좋습니다. 특히 X, Y 축을 측정할 때는 같은 축을 측정하는 센서의 방향이 일치하도록 잘 맞춰서 바닥에 고정해야 합니다.
지금까지 진동 측정에 대해서 기본적인 내용을 살펴봤습니다. 조금이나마 여러분께 도움이 되기를 바랍니다.
'제진대 > 진동' 카테고리의 다른 글
| Vibration Criteria (진동 기준) (3) | 2022.03.21 |
|---|---|
| 실제로 진동을 측정하려면 (0) | 2022.03.21 |
| 진동 센서 2 (0) | 2022.03.19 |
| 진동 센서 (0) | 2022.03.19 |
| 진동이란? (0) | 2022.03.19 |



댓글